双态建模和控制器整定系统
双态动态建模和控制器整定系统与双态流程模拟软件结合,或者通过数据采集系统将实际生产设备及流程结合,完成开环和闭环动态模型辨识,开环和闭环多种手动或自动PID整定计算。
该系统能进行单回路控制,串级控制, 前馈控制,比例控制,分程控制,支持各种形式多个厂家PID算法和算法间互相转换。通过在各种工况做各种动静态测试,可以获取过程动态模型,用于量化非线性,确定非线性补偿方案。
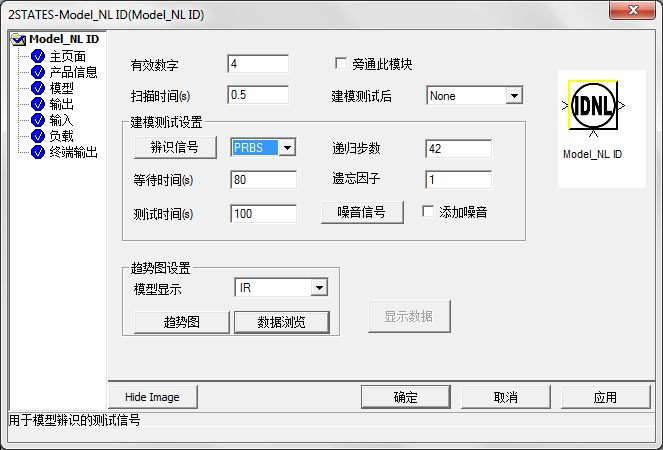
开环和闭环动态模型辨识测试信号包括伪随机二进制信号(PRBS)、阶跃信号、方波信号、三角波信号和随机信号。用户可以根据流程动态特性和对流程扰动限制进行测试信号选择和参数设置。模型拟合可以在测试后自动完成,也可以通过模型拟合界面完成,并获得模型拟合结果分析和拟合曲线。
 |
 |
| 动态建模测试设置 |
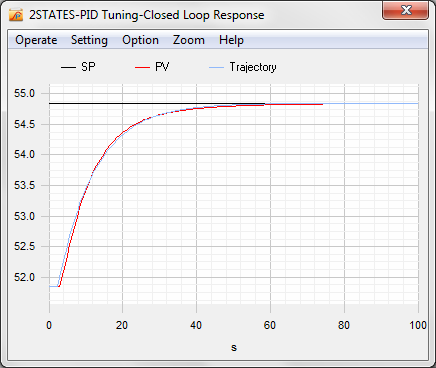
模型拟合结果:测试与模型数据曲线比较 |
 |
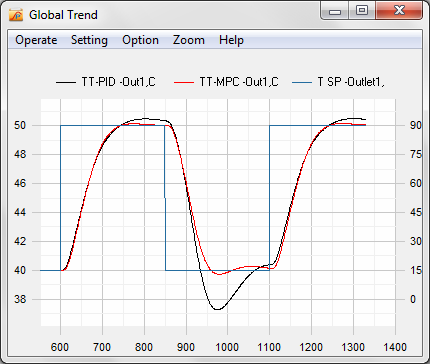 |
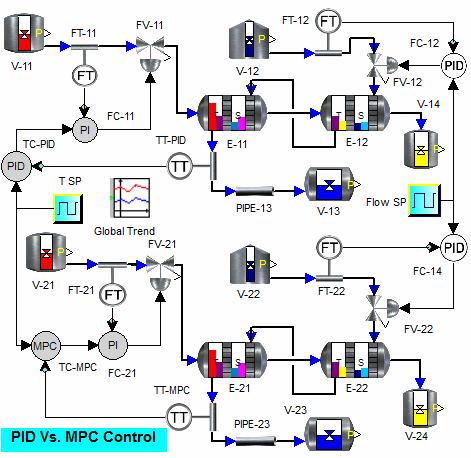
| PID与MPC温度控制在给定值 变化下的控制性能比较 |
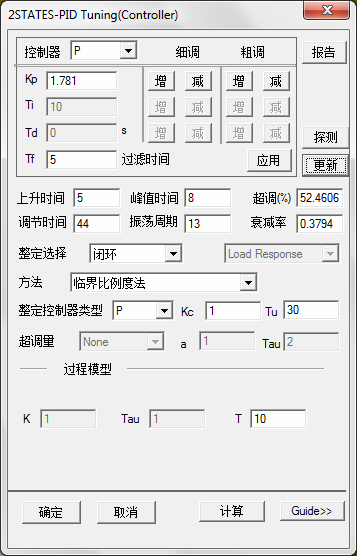
控制器选择和整定是控制设计中重要步骤。用户可以通过选择控制器厂家和型号来设置PID控制器类型,手动输入或利用各种开环和闭环整定方法获得PID参数。
双态建模和控制器整定系统提供各种环境和工具帮助用户整定计算PID参数和实现各种控制方案。开闭环整定方法包括临界比例度(Ziegler-Nichols) 法、衰减曲线法、 Kappa-Tau法、Cohen-Coon法、Chien法、Hrores-Reswick法、 Modulus Optimum(BO) 法、Symmetrical Optimum(SO)法、Lambda整定法、 IMC(Internal Model Controller)法、DPD2法。
双态建模和控制器整定系统提供以成本函数(IAE、ISE、ITAE和ITSE)为优化目标获取PID参数的整定方法。此方法可以选择性的根据用户指定的控制变量参考轨迹优化PID参数。
双态建模和控制器整定系统提供模型预测控制(MPC)。用户可以获取动态过程简化数学模型作为MPC内部模型,设置控制变量参考轨迹,实现MPC对过程的控制。用户可以进行PID与MPC全面性能比较分析。
 |
 |
|
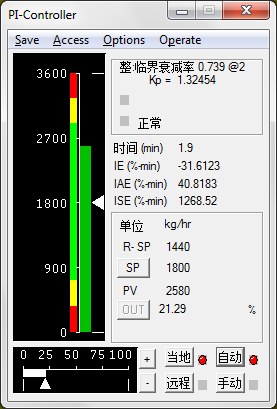
| PID在线手动整定过程 |
||
 |
 |
|
| 包含多种整定准则的PID整定操作界面 |
PID控制器面板 |
指定参考轨迹优化结果 |
