控制设计实训
2STATES控制设计实训是基于高保真2STATES动静态建模和仿真软件基础上开发的典型实例。实例包括与控制设计和应用有关的设备选型,控制器选型,控制过程建模,控制器整定和控制性能评估。实例包括
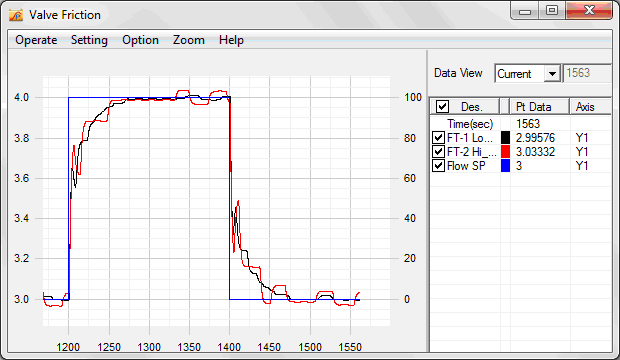
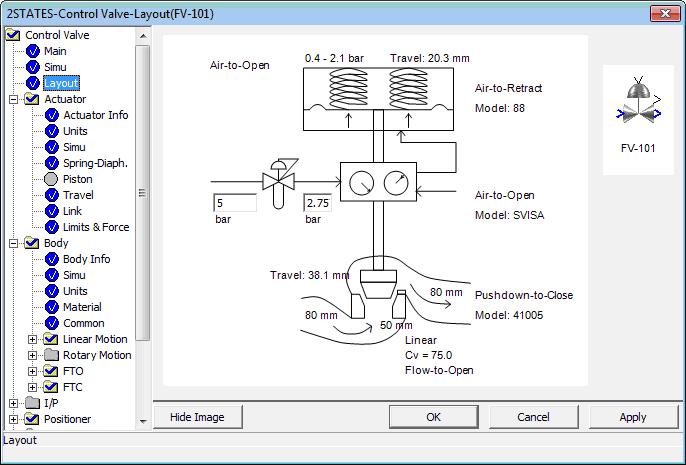
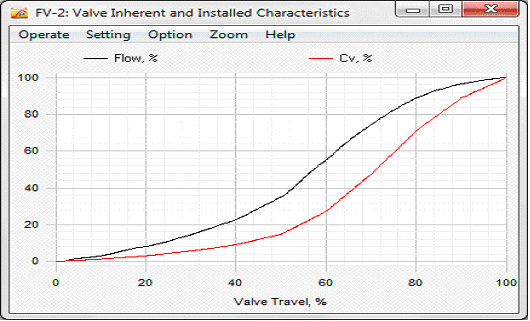
1.控制阀门选型和流量特性曲线测试
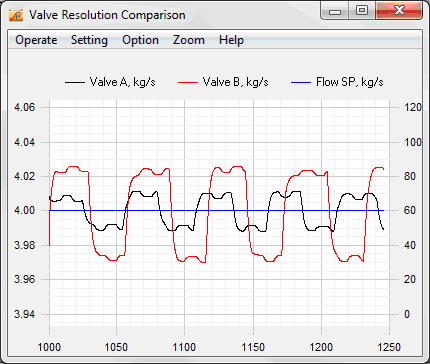
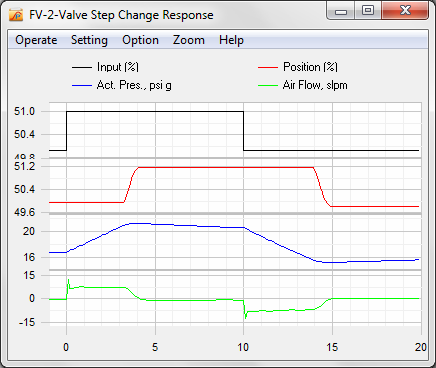
2.控制阀门摩擦力对流量控制影响
3.流量控制非线性问题及解决方案
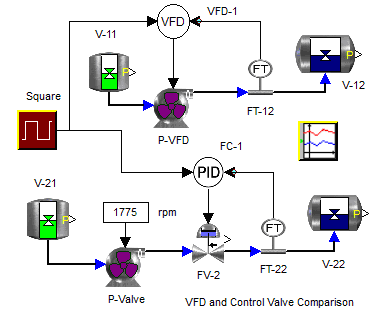
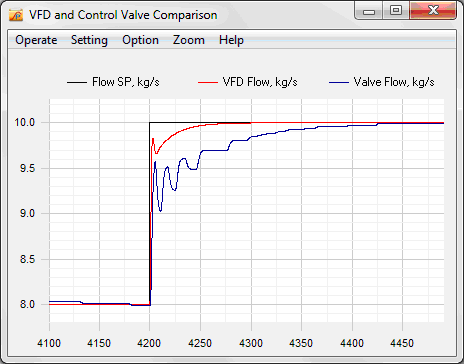
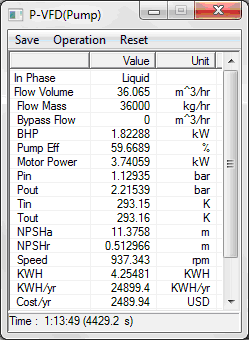
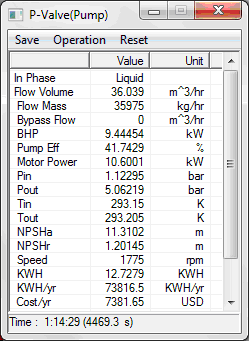
4.变频驱动泵和控制阀门方案比较
5.生产过程动态测试和模型辨识
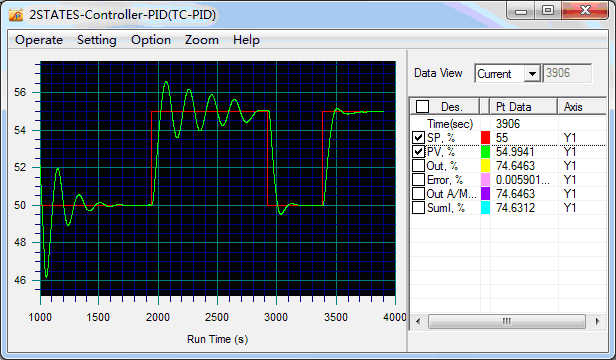
6.PID控制器开环整定和闭环整定
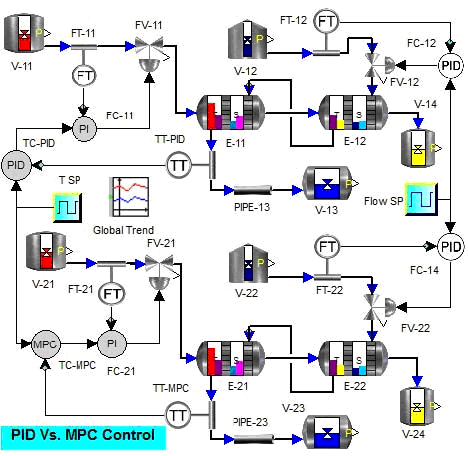
7.模型预测控制(MPC)设计和实现
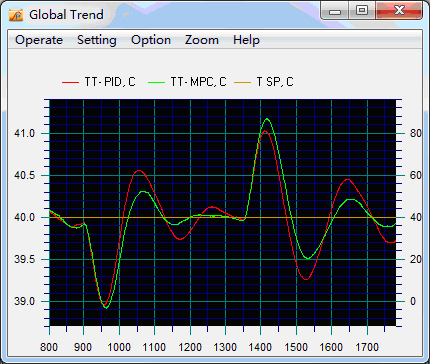
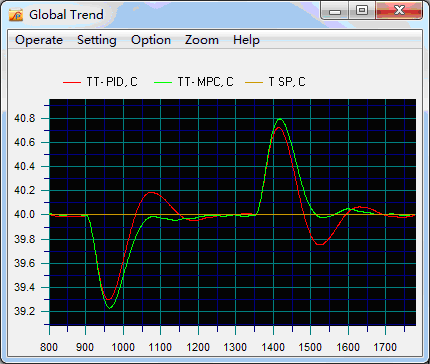
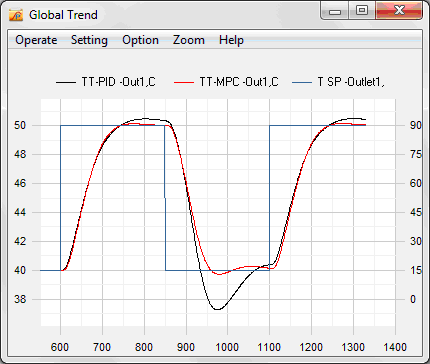
8.PID和MPC性能比较
9.液位控制系统
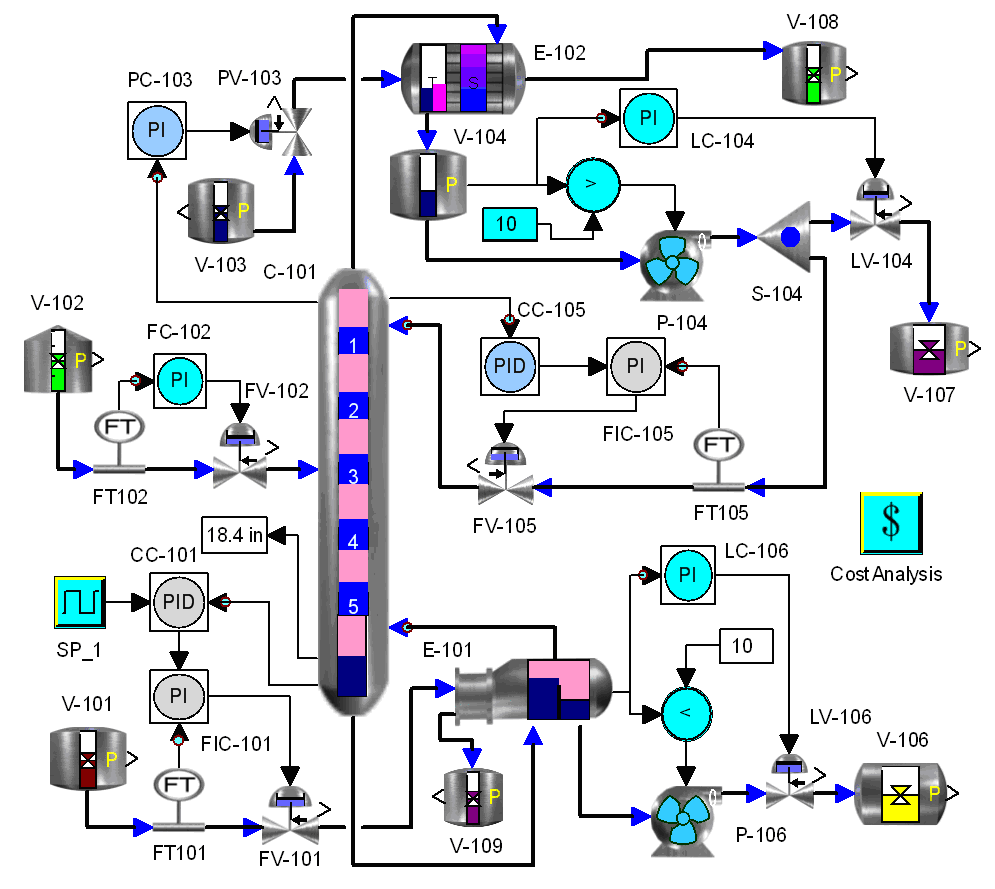
10.板式精馏塔控制
11.填料塔控制
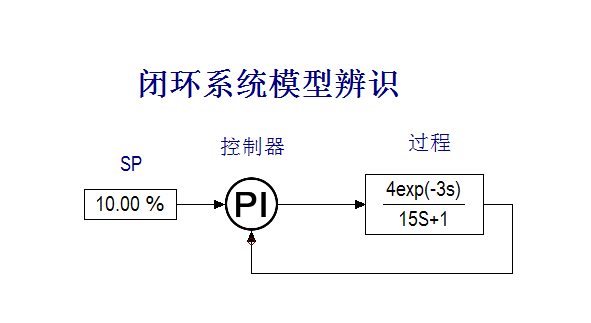
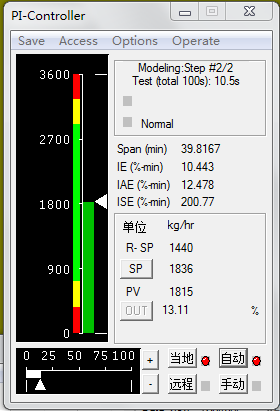
系统模型辨识
传递函数闭环系统模型辨识
|
|
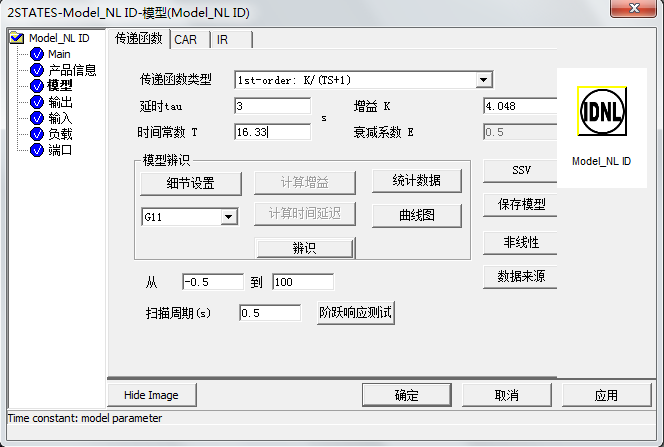

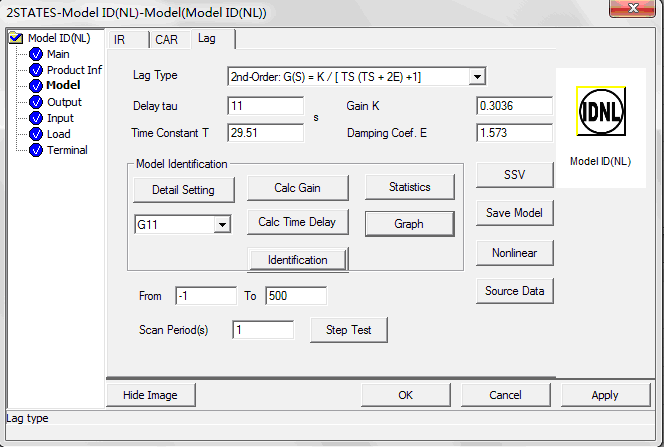
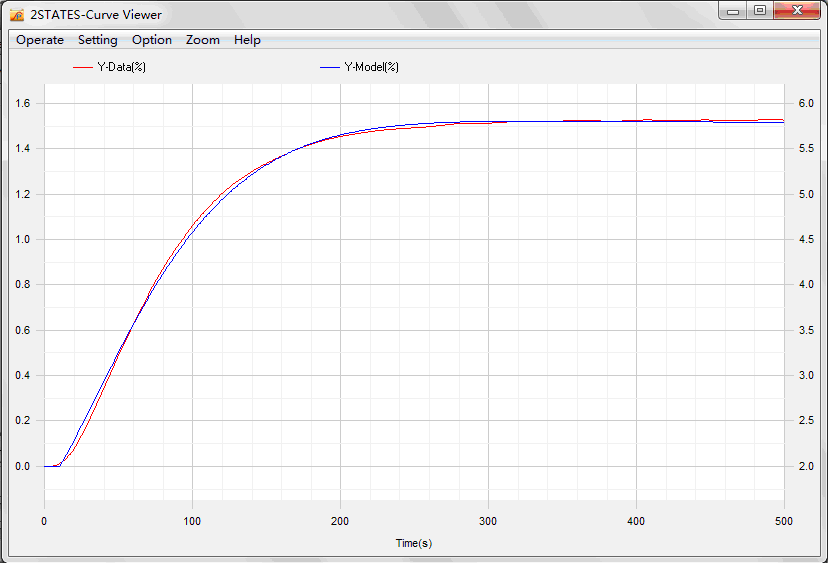
实际工业过程开环系统模型辨识
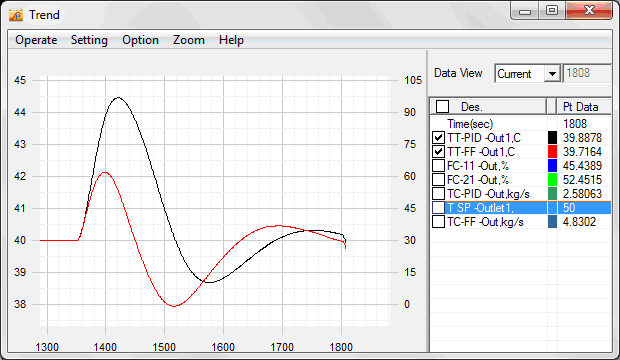
设置结束后点击辨识按钮开始模型参数回归。回归参数结果如图20。延迟时间tao=11s,增益K = 0.3036,时间常数 T = 29.51 s,衰减因子E = 1.573
|
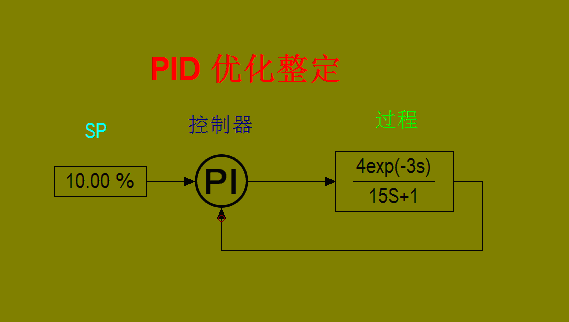
典型过程控制回路控制器整定
|
双态仿真软件提供了优越的环境和完备的工具用于控制器设计和整定。双态仿真软件的高保真建模为模型辨识提供了精确的数据来源。
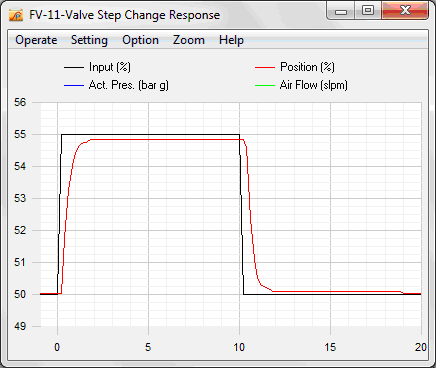
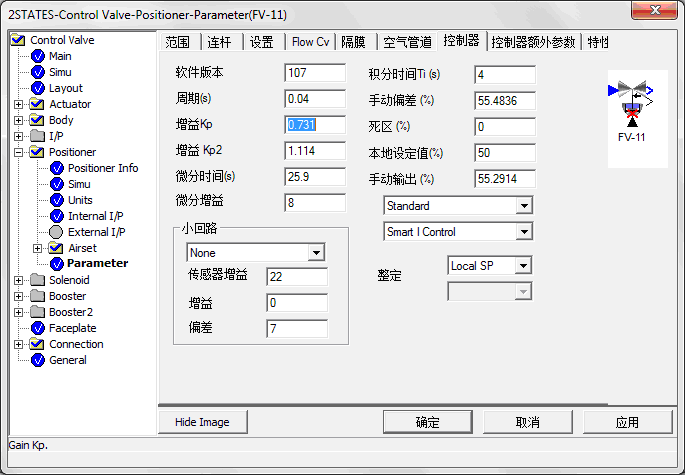
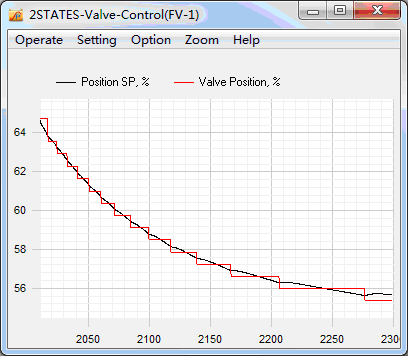
对于常用流量和压力控制回路,控制阀动态性能受各种非线性行为影响,如非线性安装特性(增益)、分辨率限制、粘滑运动、非对称行程响应、行程速度限制和死区等,因此控制阀的高保真建模对于描述控制系统、流量及压力控制器的参数整定有决定性作用。
|

流量控制流量控制
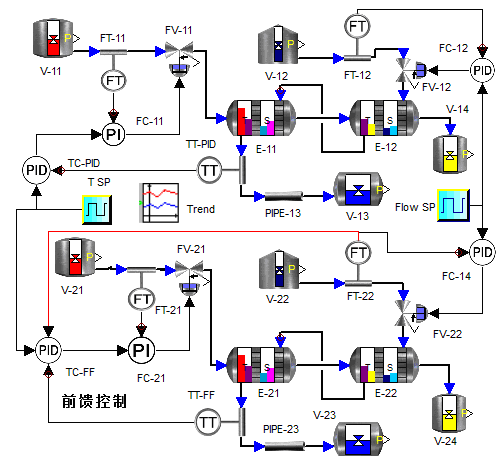
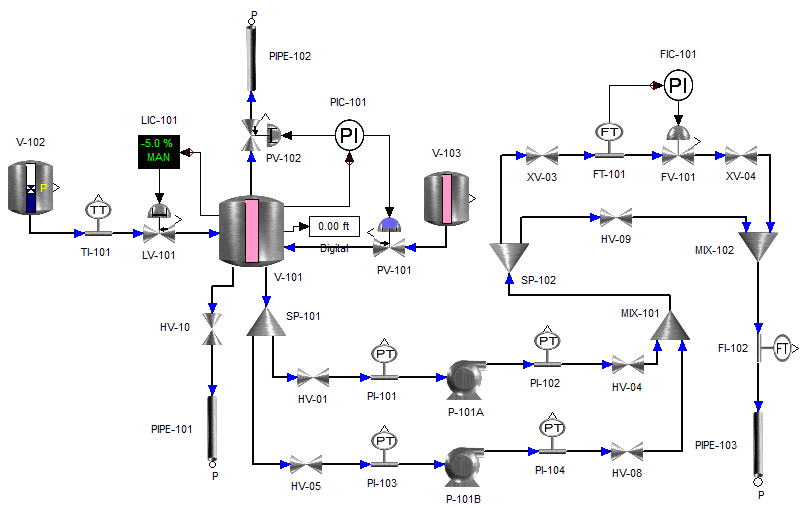
流量控制可以通过调节阀门开度控制,也可以通过调节离心泵转速来控制(变频控制)。变频流量控制在节能降耗方面具有重要意义。图30的仿真流程不仅比较了阀门控制与变频控制系统的性能,还量化了节能的效果。
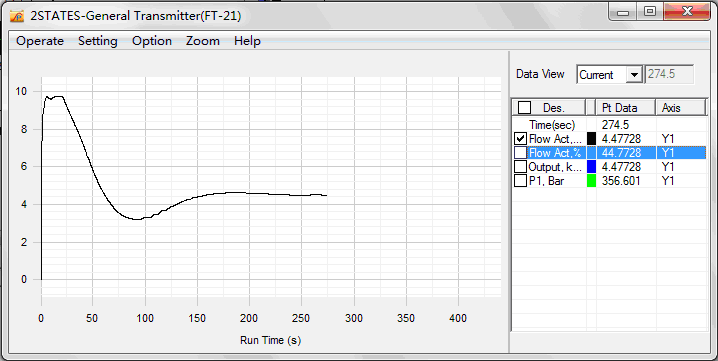
实际过程流量控制器开环优化整定
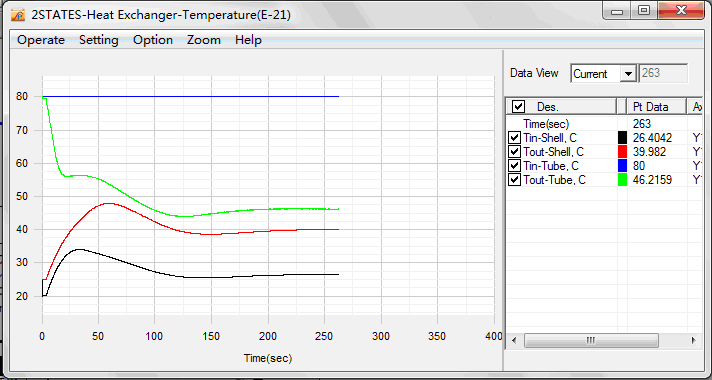
温度控制
流体组分控制
流体组分控制多见于化工反应过程、分离过程及流体混合过程中,精馏塔分离组分控制可通过灵敏板温度控制或直接组分控制来实现。
流体组分流体组分控制器在线手动闭环整定
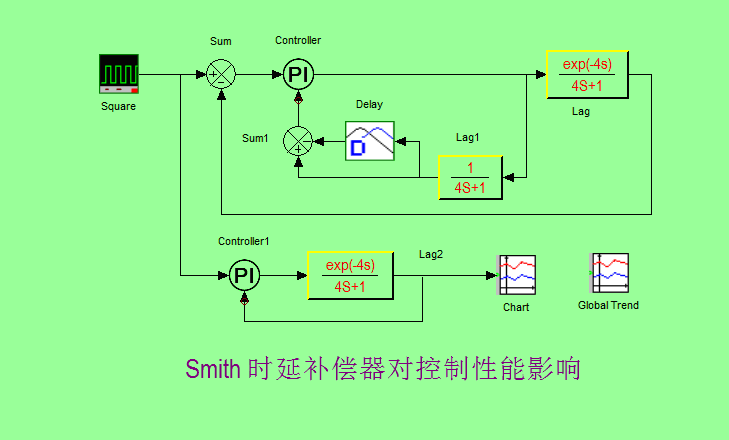
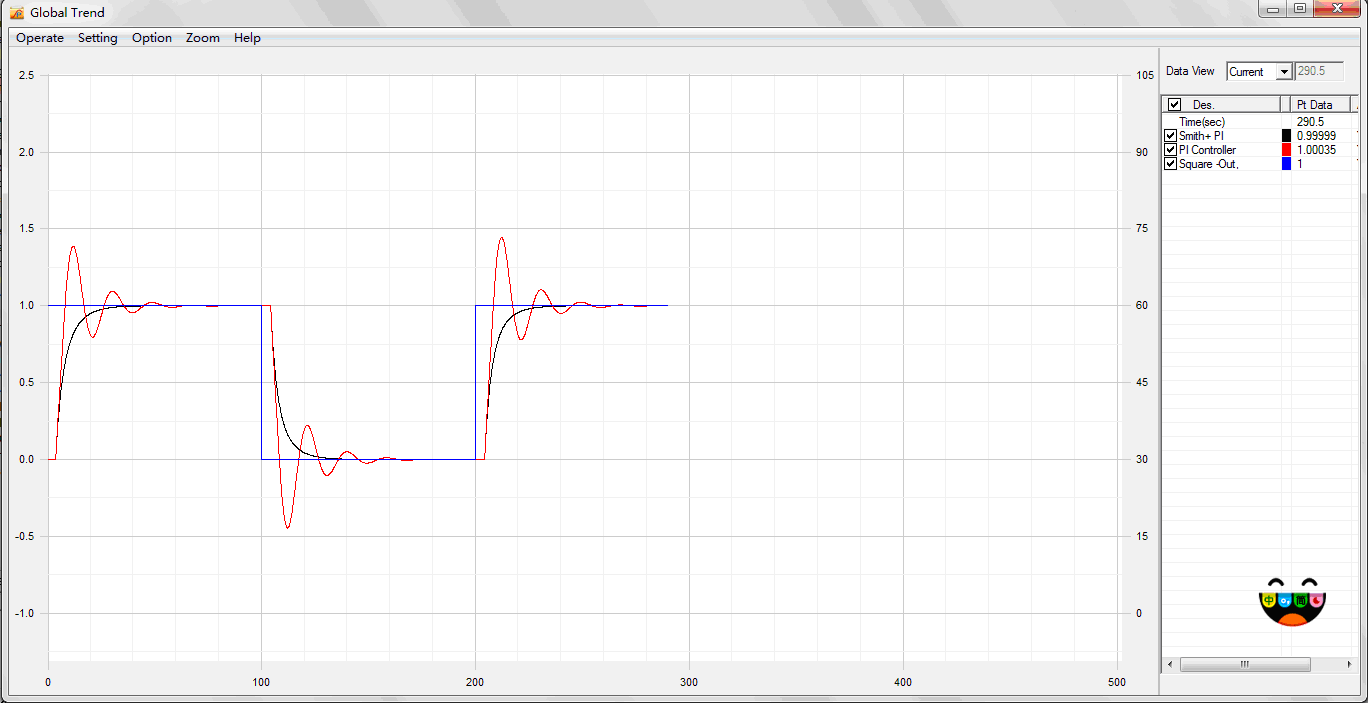
压力控制系统开环优化整定 SmitSmith时延补偿器对控制性能影响
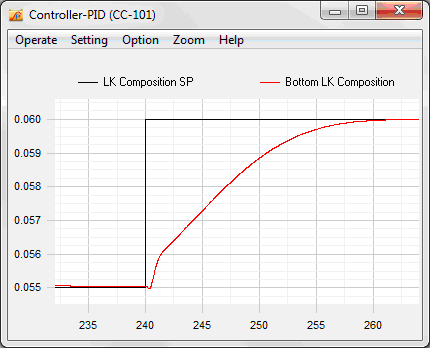
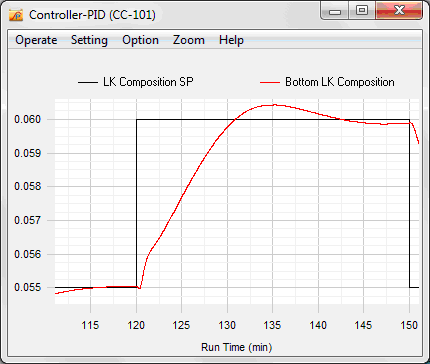
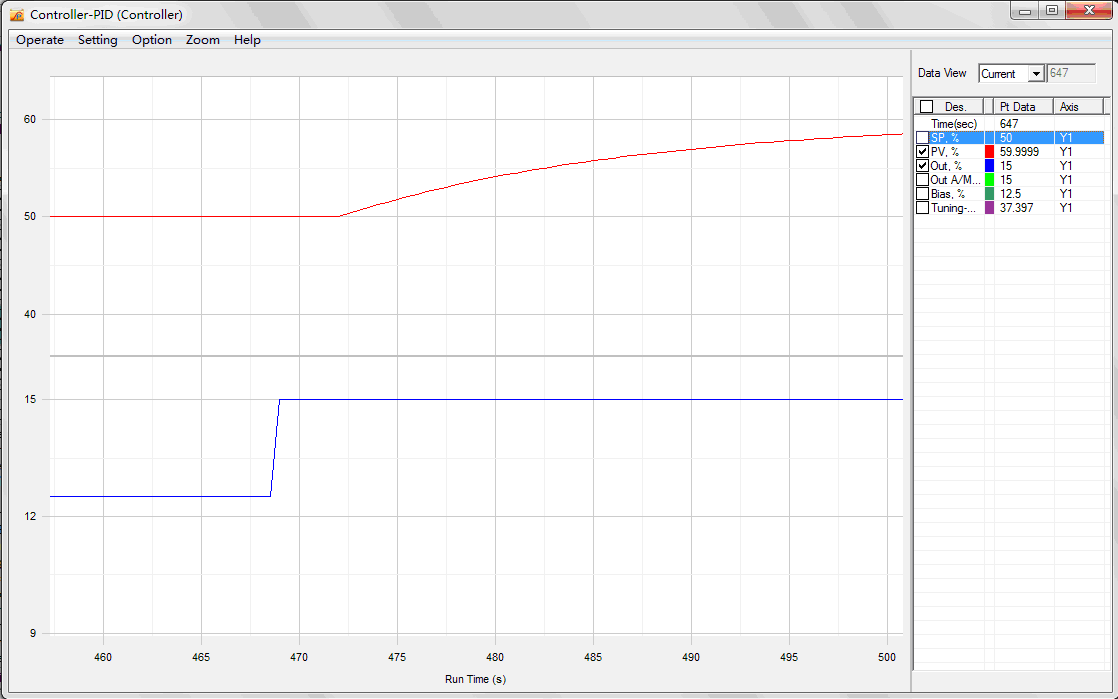
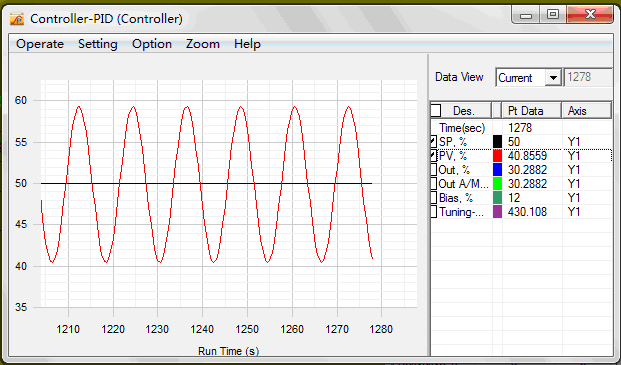
控制器PID参数闭环优化整定
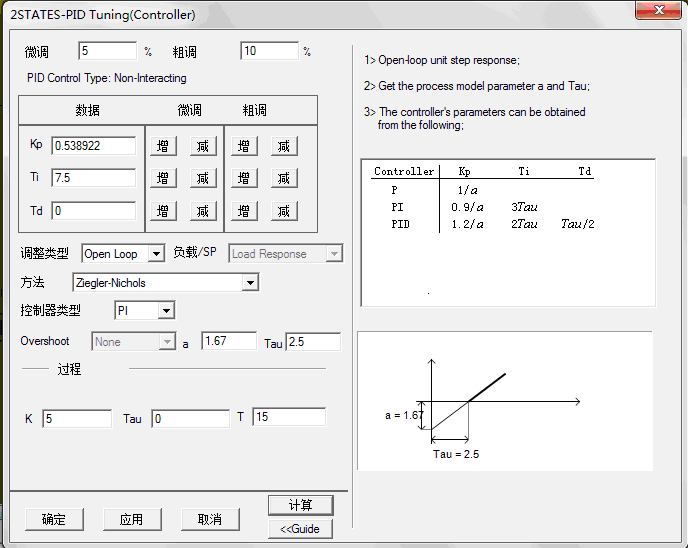
控制器P控制器PID参数开环优化整定
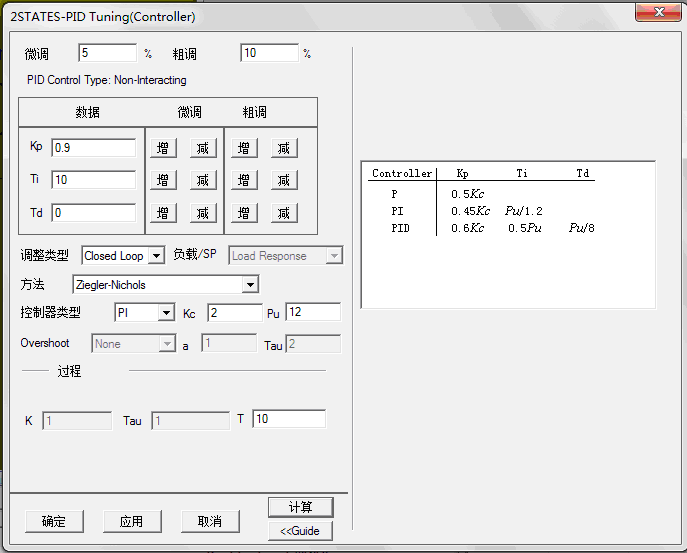
控制器PID参数闭环优化整定(利用整定准则)
利用整定准则闭环优化整定上述过程,获得闭环整定所需要的控制器增益Kp和震荡周期Pu数值,将控制器设置为比例控制器,并将增益Kp设置为0.5。
阀门位置阀门位置控制
前馈控制前馈控制
控制系统控制系统设计
|